


- NON-WOVEN GEOTEXTILE
- FIBERGLASS GEOGRID
- HDPE GEOMEMBRANE
- WATERPROOF LINER
- BIAXIAL GEOGRID
- WARP KINTTED POLYESTER GEOGRID
- PP Welding Biaxial Geogrid
- HDPE UNIAXIAL GEOGRID
- HDPE GEOCELL
- PLASTIC GRASS PAVER
- DRAINAGE NET
- GCL
- PP FIBERS
- GEOMAT
- Rubber tracked robot chassis/robot undercarriage
- Add: EAST OF TAIDONG ROAD,TAIAN,SHANGDONG,CHINA
- Tel: 86-538-8565299
- Fax: 86-538-8565299
- Email: inquiry@cncadeer.com doris@cncadeer.com
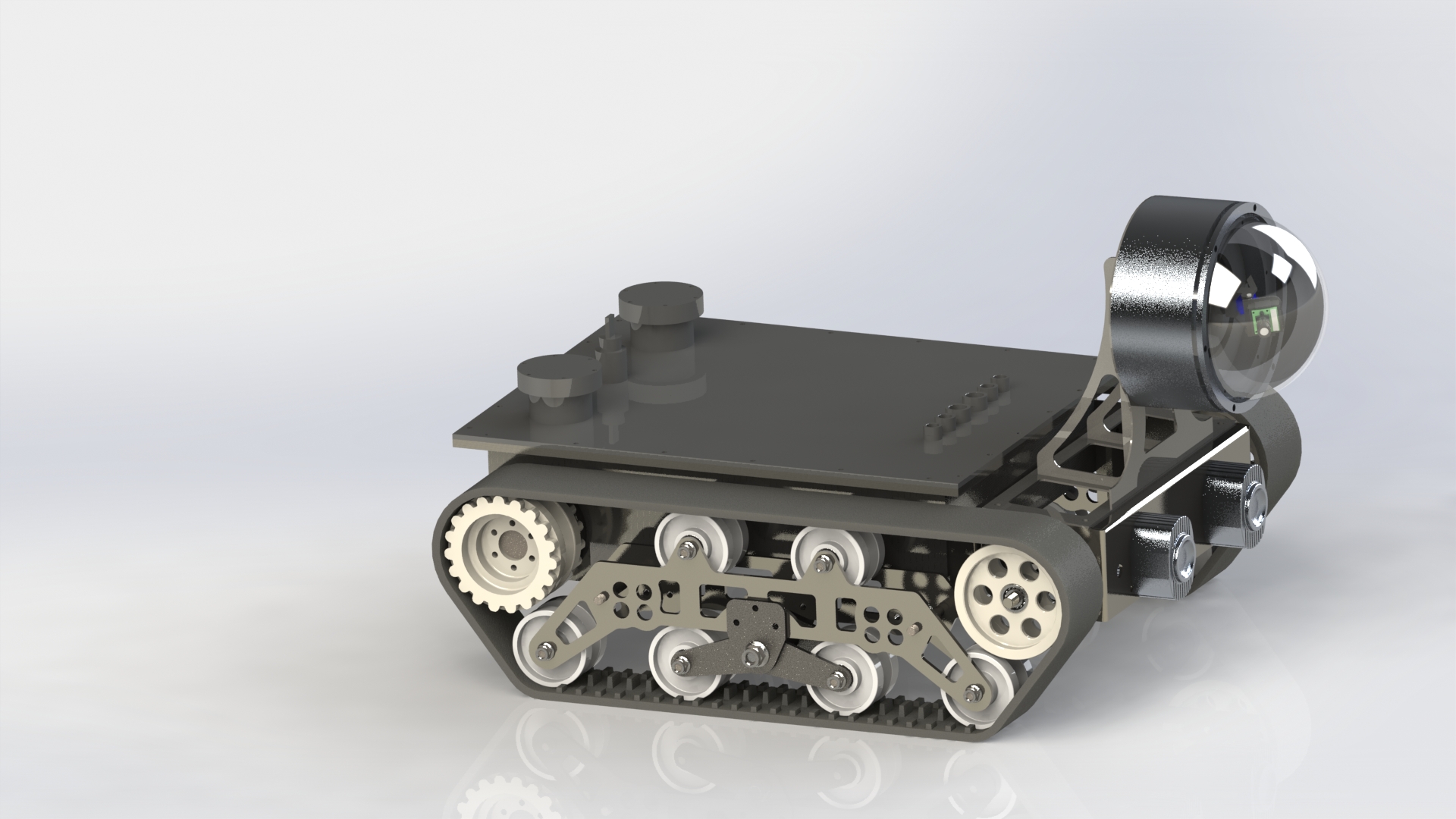


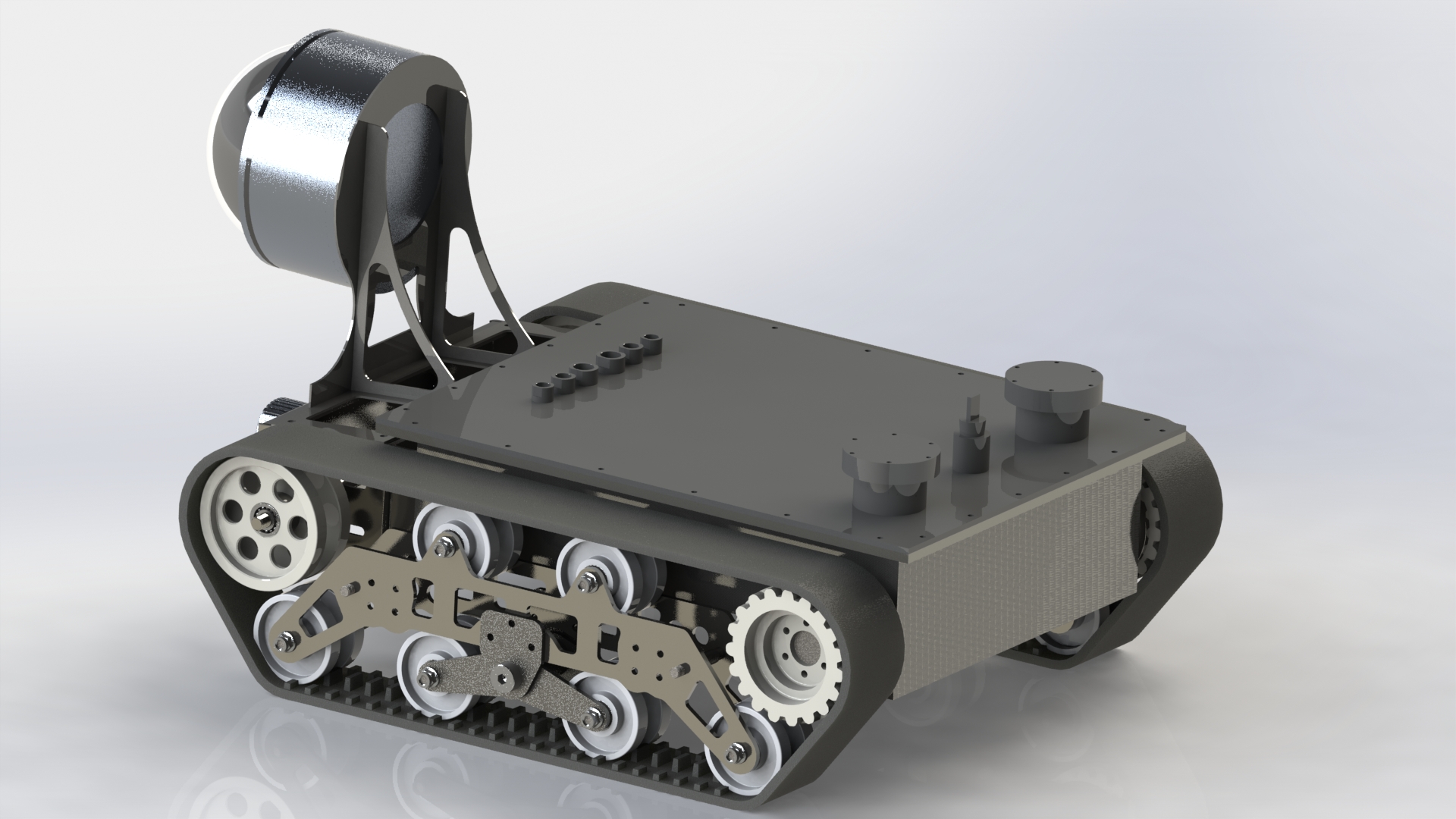

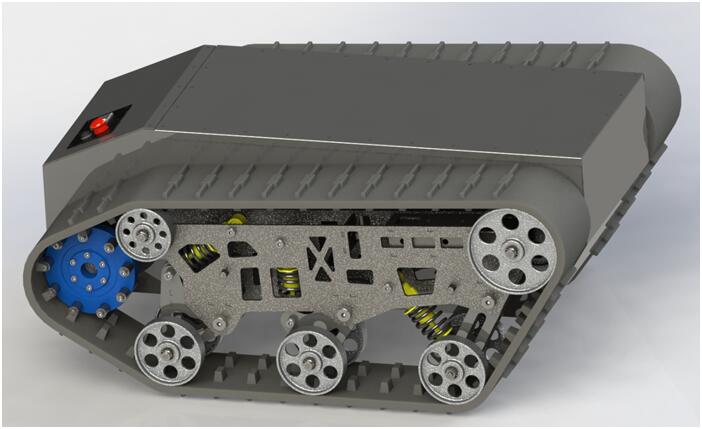
T80-650 Tracked robot chassis (waterproof type)
- T80-650 Tracked robot chassis (waterproof type)
- Product description: T80-650 Tracked robot chassis (waterproof type)
Product introduction
T80-650 Tracked robot chassis
(waterproof type)
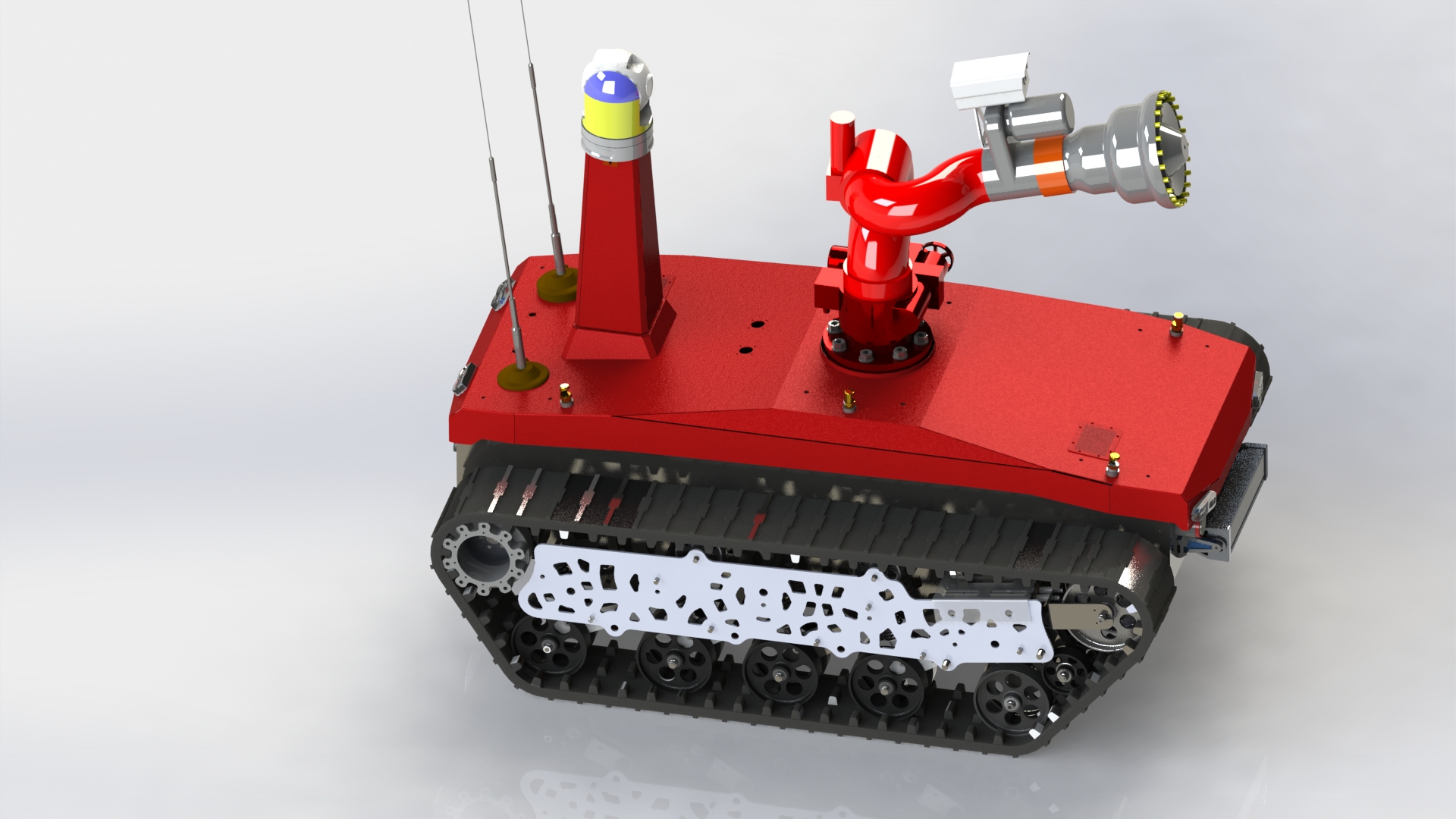
Applicable Environment
The product is mainly used for underwater video detection in freshwater environment. It is designed according to the parameters of underwater deep diving of 10 meters (pressure 0.1MPa). The parameters are as follows. Emphasis is placed on adapting to underwater sediment, water plants and underwater pressure and sealing requirements. The utility model adopts a streamer above the water surface for cable transmission control signals, and a traction tow hook, a fixed cable and a steel wire tow rope are installed before and after the vehicle body.
Chassis part:
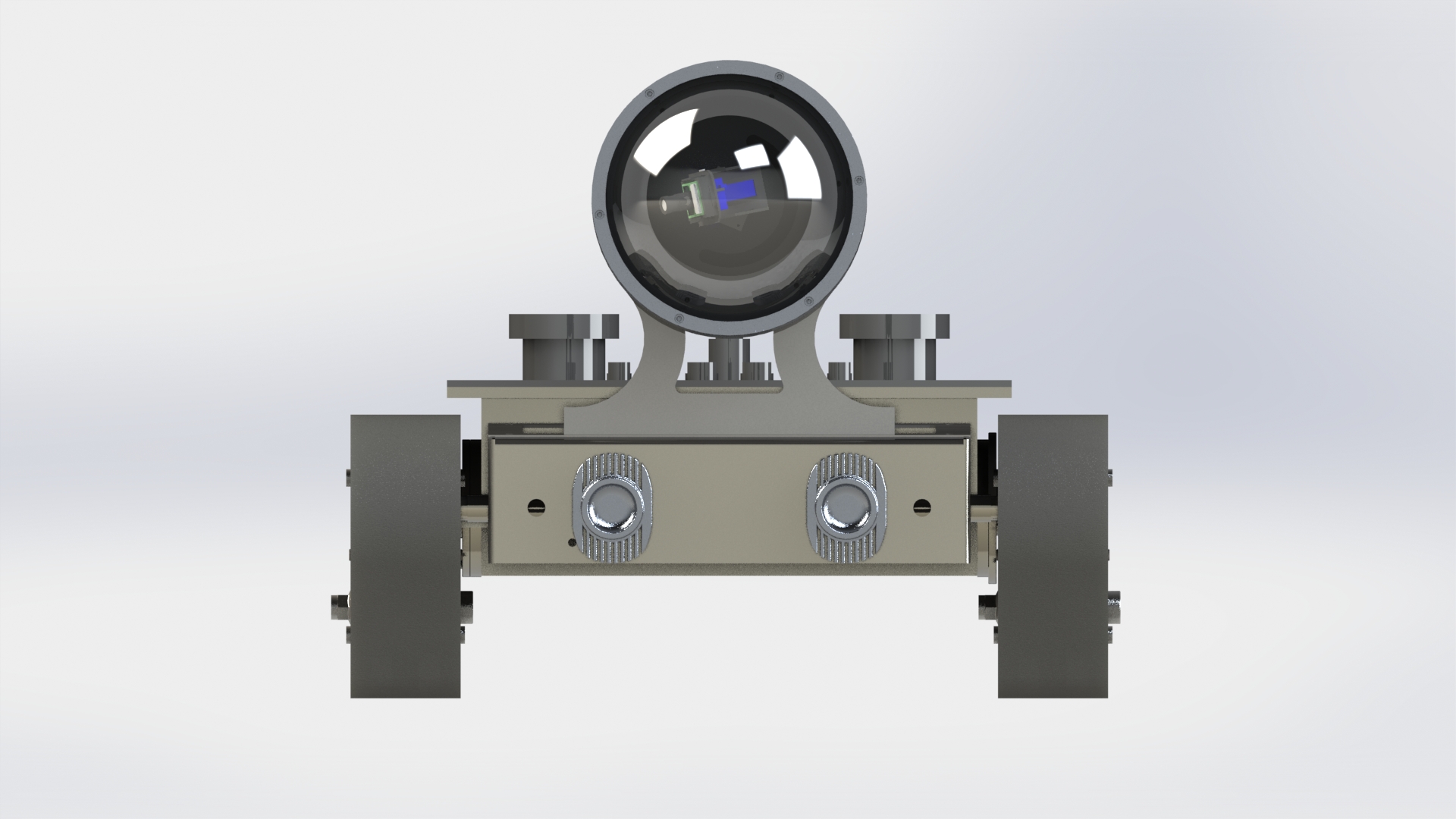
1. The size of the chassis is controlled by the length of 650mm, the width of 570mm, the height of 300mm.
2, the overall sealing structure
3. Motor reducer and driver adopt pressure-proof sealing structure
4, protection level: 10m under deep diving
5, driving speed: 0.53M / s
6, the overall weight control within 65KG
7, obstacle height: 138mm (ground)
8, using rubber track 80mm width, embedded Kevlar fiber
9, 80mm off the ground, can adapt to the mud around 50mm underwater.
10, reserve all kinds of hardware and software interfaces, easy to upload and control development, closed loop or open loop design
11. Power supply: Power supply above the water surface, connected by cable. Built-in lithium battery, battery life is about 1 hour.
12. Driver: Intelligent dual DC brushless driver for main motor JCDBL2430-2E
13, industrial remote control, cable transmission signal.
Product features
1. The shell adopts integral sealing and pressure underwater transmission, and the components are pressure-resistant, waterproof and anti-corrosion components.
2. The power output of the chassis part is equipped with DC brushless motor and planetary reducer. The motor speed is 3000rpm, 24V-207W, the reduction ratio of the reducer is about 1:40, and the walking speed is 1.9KM/h.
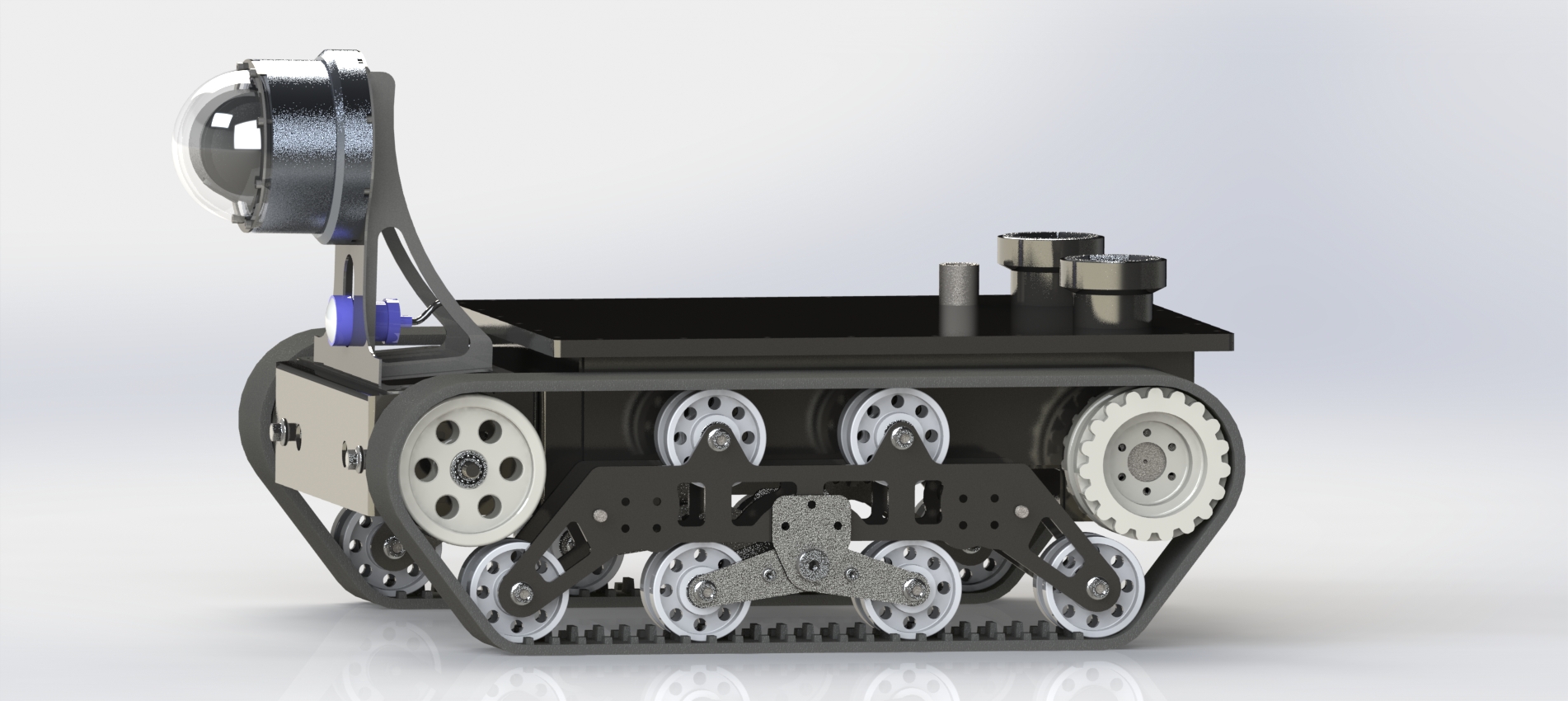
3. The driving wheel is made of nylon material, the roller is made of aluminum, and electrophoresis is used to effectively prevent corrosion.
4, using nylon glass bearings, nylon drive wheels, stainless steel body frame and other materials, fully consider the underwater operating environment.
Basic Parameters
Chassis
|
Design Size: |
655*573*300mm |
Operating Speed: |
0~1.9KM/H |
Driving Wheel’s Diameter: |
115mm |
Track Material |
80mm High Quality Rubber Track |
|
Main Material: |
Stainless Steel 304/Alloy Steel Plate/Aluminum |
Protection Level: |
Underwater 100m |
|
Signal Transmission: |
Streamer Connection |
Surface Treatment: |
Spray / Spray Paint |
|
Rated Power: |
207W*2 |
Design Load: |
150KG |
|
Motor Selection: |
24V DC Brushless Motor |
Rated Torque: |
21NM |
|
Reduction Ratio: |
1:40 |
Maximum Span: |
200mm |
|
Maximum Obstacle: |
138mm |
Maximum Climbing: |
>30% |
Power
01、Motor Reducer
02、Diver
JCDBL2430-2E :
The KYDBL2450-2E is an intelligent DC brushless single motor controller. The controller uses a high-performance 32-bit MCU with advanced motion control algorithms and external quadrature encoder inputs for motor motion in open-loop and closed-loop speeds and closed-loop torque. The controller has multiple analog inputs, pulse inputs and digital I/O ports that can be redefined by dedicated software. Universal RS232, CAN bus serial communication, USB communication, can be widely used for automation.
Recommended battery capacity and dimensions
1, Battery Parameters: 24V24AH, imported batteries.
2, Installation Method: body built.
3. Dimensions: 260*160*85(mm)
4. Rated Current: no less than 25A


 cadeer
cadeer
